The Climbing Cling robot will crawl over the exterior of a building by tele-operation (remote control) or programming while the power and the cleaning/painting fluids can be supplied from the rooftop.
There are two methods of deployment and operation of the climbing Cling:
- Using only the stepping mode in combination with suction cups to move the robot.
- Using the suction cups in combination with motorized wires to move the robot.
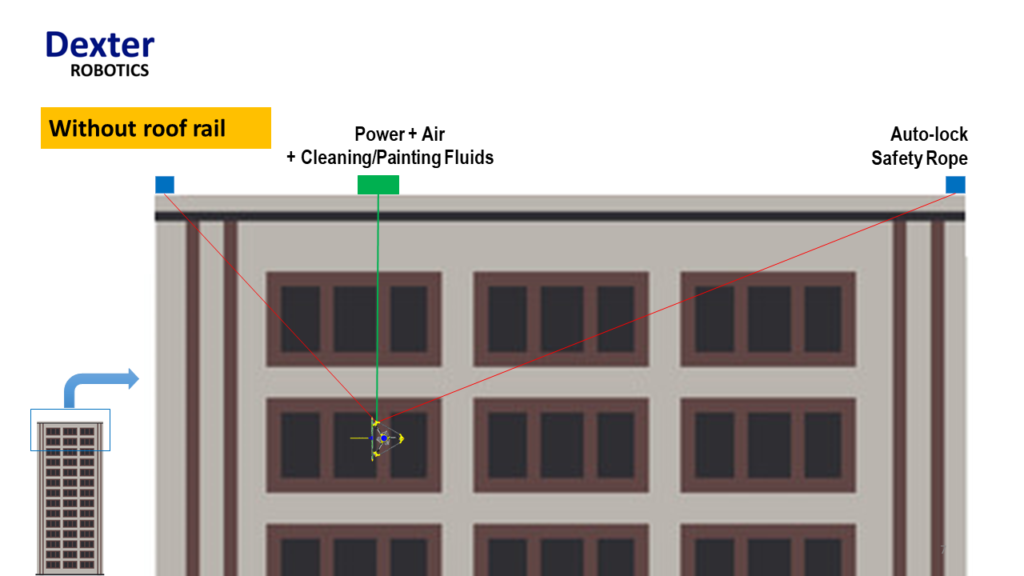
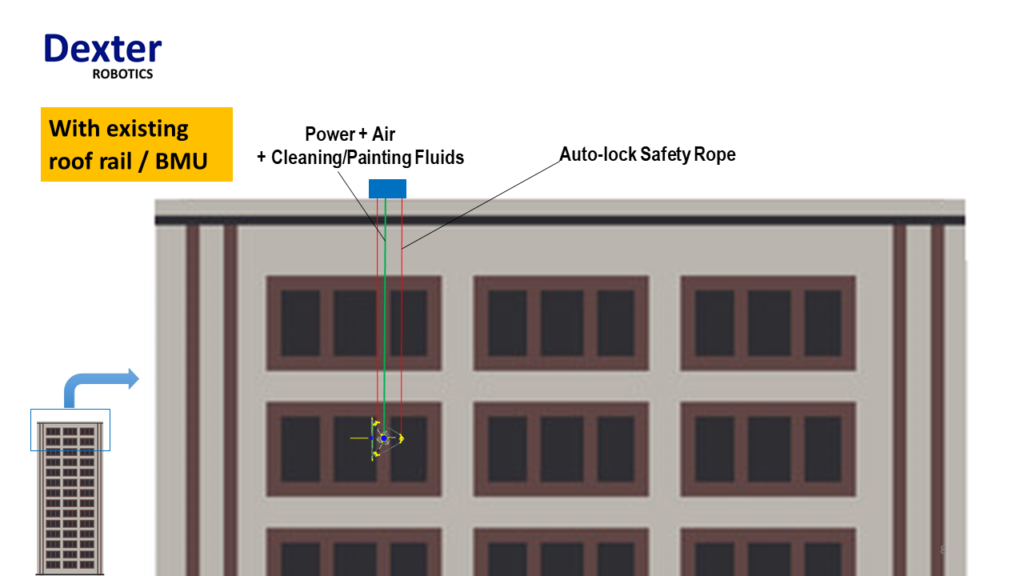
The schematic below depicts the first method. The Climbing Cling robot can be deployed without and with roof rail as shown below. An auto-lock safety rope is used for safety purpose.
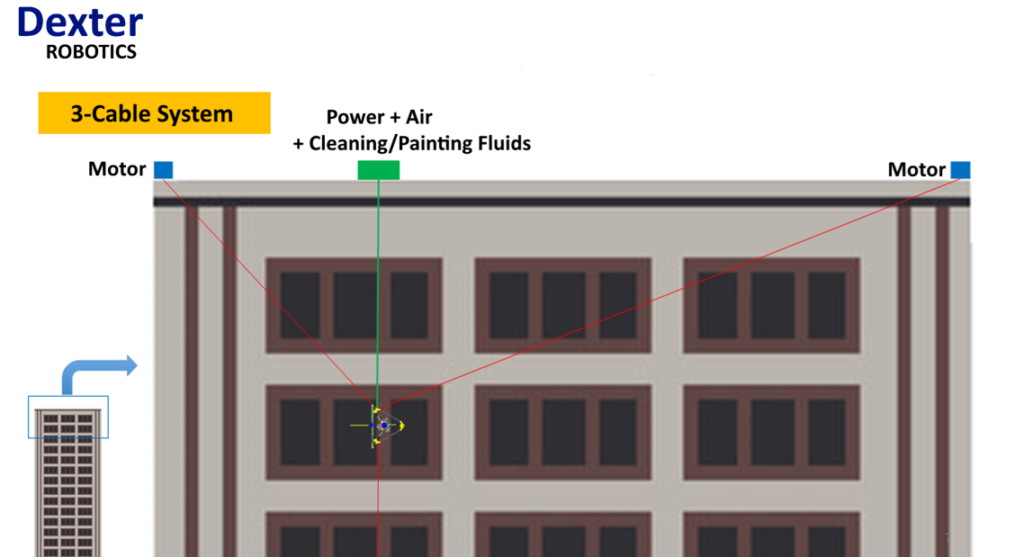
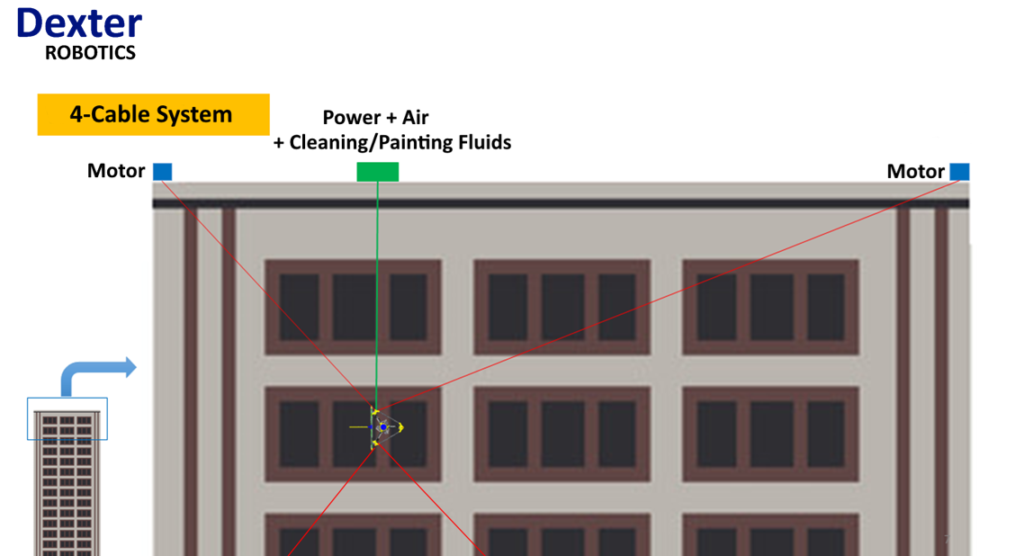
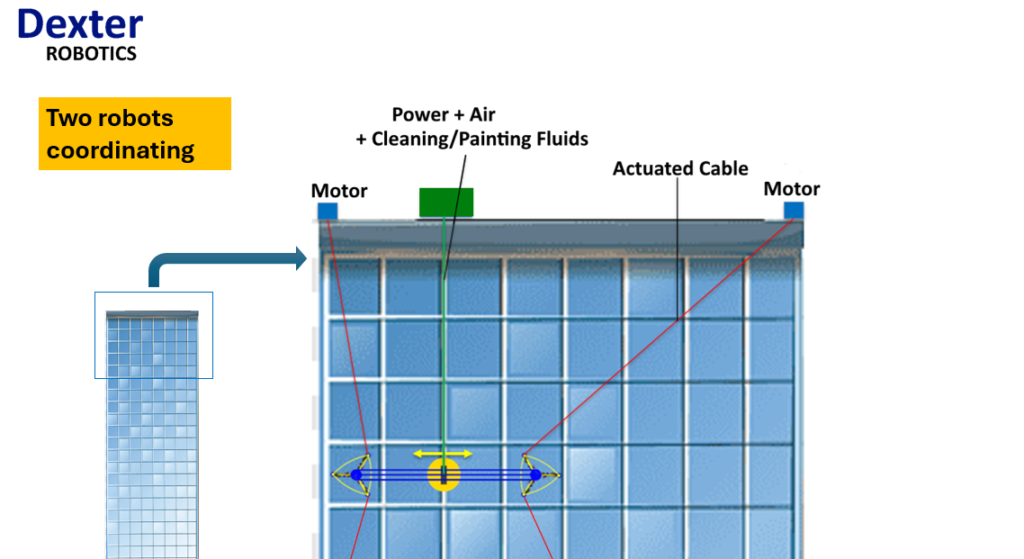
The schematic below depicts the second method. The Climbing Cling robot can be driven by three or four motorized wires (cables) as shown below. To achieve a much faster motion, a setup with two coordinating robots can also be used. In this case, the cleaning/painting module traverses along a beam installed between the two robots.